|
|

|
Features: According to the mathematical equations listed below, rotation angle can be calculated precisely. Date Calculate:
X1 Axis:δX1=R cos (δθ+θX1+θ0)-R cos (θX1+θ0) X2 Axis:δX2=R cos (δθ+θX2+θ0)-R cos (θX2+θ0) Y Axis:δY =R sin (δθ+θY+θ0)-R sin (θY+θ0)
δX1:X1 Axis relative movement (mm) } δX2:X2 Axis relative movement (mm) }(movement driven by ball screw) δY :Y Axis relative movement (mm) }
θX1:Angle position of pivot on X1 Axis ( ° ) θX2:Angle positoin of pivot on X2 Axis ( ° ) θY :Angle position of pivot on Y Axis ( ° ) θ0 :platform angle before movement ( ° ) δθ:rotation angle of platform ( ° )
R:radius distance from platform center to center of rotation bearings |
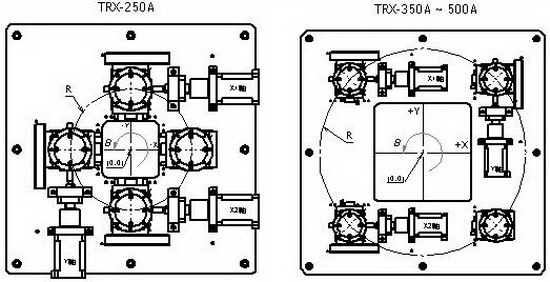
| Type | R | θY | θX1 | θX2 |
| TRX-250A | 85 | 180° | 90° | 270° |
| TRX-350A | 135√2 | 45° | 135° | 225° |
| TRX-400A | 155√2 | 45° | 135° | 225° |
| TRX-500A | 195√2 | 45° | 135° | 225° |